What role does the encoder and control system play in the micro reducer?
Publish Time: Author: Site Editor Visit: 6371
In a micro reducer like the ZHAOWEI, the encoder and control system play crucial roles in ensuring precise and efficient operation. Here’s a detailed explanation of their functions:
-
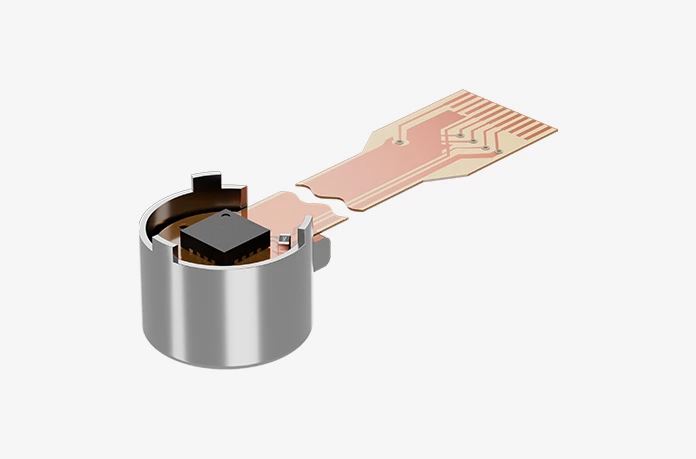
Encoder:
- Position Feedback: The encoder provides real-time feedback on the position, speed, and sometimes even the torque of the motor shaft. This feedback is essential for the control system to accurately determine the motor's current state and adjust as needed.
- Resolution: Encoders vary in resolution, which determines the precision of position feedback. Higher resolution encoders provide finer positional accuracy, crucial in applications where precise movement is required.
- Closed-loop Control: By continuously comparing the actual position from the encoder with the desired position, the control system can adjust the motor's operation to achieve and maintain the desired speed and position accurately. This closed-loop control improves stability, reduces errors, and enables smoother operation.
-
Control System:
- PID Control: The control system typically employs a PID (Proportional-Integral-Derivative) controller or a more advanced control algorithm. PID control uses the feedback from the encoder to calculate corrections to the motor's power supply, ensuring that the motor follows the desired trajectory with minimal error.
- Speed and Torque Regulation: Depending on the application, the control system regulates not only position but also speed and torque. This capability is crucial for maintaining operational efficiency and safety, especially in robotics, automation, and other precision applications.
- Integration with Power Electronics: In many micro reducer systems, the control system interfaces with power electronics such as inverters or amplifiers to modulate the power supplied to the motor. This integration allows precise control over the motor's speed and torque, optimizing energy consumption and performance.
In summary, while the encoder provides accurate feedback on the motor's physical state (position, speed, torque), the control system interprets this feedback to adjust the motor's operation in real-time. Together, they form a closed-loop system that ensures the micro reducer operates efficiently, precisely, and reliably in various industrial and robotic applications.